При разработке дистанционного управления ПТРК потребовалось реализовать управление настройкой на резкость. Использовали моторредуктор и оформили в корпус для приличия. 3D печать существенно помогает изготавливать прототипы.


Место креативных людей
При разработке дистанционного управления ПТРК потребовалось реализовать управление настройкой на резкость. Использовали моторредуктор и оформили в корпус для приличия. 3D печать существенно помогает изготавливать прототипы.
Внутри модем LoRa, протокол кастомный под свои устройства, но можно и любой реализовать.
Старую электронную начинку в помойку, новую внутрь. Есть конечно идея малой кровью обходитья, ставить конвертер из USB протокола, но пока в разработке.
Если немного пошерстить в кладовке, то можно быстро сваять что-то новое и избавиться от старого.
Представляю простую версию наземной станции управления беспилотником.
В данной версии:

Собрал модуль из двух драйверов HC-160A S2, всего 4 канала. Планировал использовать для управления двигателями наземной робототехнической платформы.
Читать далее «Драйвер двигателей постоянного тока HC-160A S2, итоги испытаний.»Манипулятор в хозяйстве очень полезная штука… особенно в хозяйстве сапера.
Манипулятор позволяет без риска для жизни производить манипуляции с объектами. А если такой манипулятор установить на один из наших НРТК, так можно и постучать в нужном месте…


На сегодня проект выполнен в виде опытного образца. Идет отработка программного обеспечения для управления понятного и ребенку…
Опыт эксплуатации наших робототехнических комплексов показал, что операторы зачастую не способны управлять ими без специального обучения. Проблемными вопросами являются:
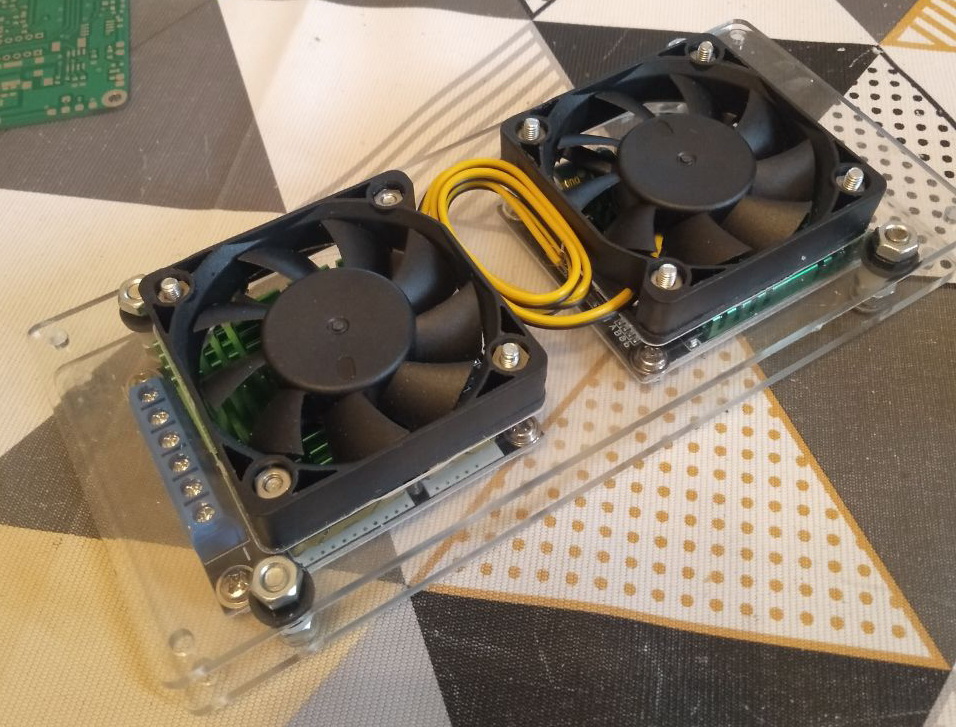
Для решения указанных проблем разработана и внедрена непосредственно в электронную начинку НРТК информационно-справочная система. Ее задачи:
Независимое творческое объединение подготовило новую версию НРТК «ВЕЗДЕХОД-2».

Все тот же ассиметричный сочлененный панцирь, все те же замечательные колеса. Изменился привод, электромоторы и электронная начинка. Питание переведено на 24В, теперь не составит труда заряжать АКБ от бортовой сети тяжелой техники.
В комплектацию теперь по умолчанию входят:
В качестве систем связи используются типовые приемники и передатчики.
Добавлен информационно-справочный портал прямо на НРТК. Можно подключиться по WiFi и провести диагностику или получить инструкции по настройкам пультов.
Динамический тормоз, позволяет плавно регулировать торможение сразу обоими бортами или по одному.
Многие используют велодрайверы BLDC моторов в своих проектах самодвижущихся механизмов. Казалось бы все описано: где газ, где тормоз… Да не тут-то было.
Разбор алгоритмов функционирования множества велоконтроллеров приводит к неутешительном выводам:
Остается решать проблему только внешним устройством и замыкать обмотки двигателя на тормозные сопротивления. Для этого поставили перекидные реле. Резисторы изготовили из нихромовых спиралей упакованных в гипс.
Управление тормозом реализовали отдельным каналом управления, заведенным на кнопку и двумя выводами контроллера управления. При нажатии на кнопку двигатели отключаются от драйверов и подключаются к тормозным резисторам.

Да, это день 2 марта 2025 года. Ранние журавли из ZRUSARM не разгибая спин спешат закончить очередного наземного робота. Семьи пока еще терпят, дома понимают, что эта работа нужна.

Задачи:
Оснащение:
Система управления либо собственная с собственной наземной станцией управления, либо комплект аппаратуры от БЛА.
Читать далее «Ранние журавли — наземный робототехнический комплекс вездеход отправился на фронт»