
По случаю у ребят в распоряжении оказался … ПТРК ФАГОТ с боекомплектом и наземный дрон ВЕЗДЕХОД. Родилась мысль их объединить и получить подвижную оружейную платформу. Обратились за помощью, почему бы и не получить новый полезный опыт.
Модернизация НРТК «Муравей», итоги.
По просьбе знакомых из ZRUSARM оказана помощь в модернизации НРТК «Муравей» прямо на переднем крае…
Трудно оценить обоснованность претензий со стороны бойцов, поскольку данный НРТК к ним поступил по запутанным каналам не в полном комплекте, но доработки производились уже с учетом требований операторов подразделения:
- заменены силовые драйверы управления электродвигателями. Стояли гироскутерные, поменяли на велодрайверы;
- заменен контроллер управления. Стоял конвертер CRSF-PWM и плата управления реле с входным сигналом управления PWM. Поставили контроллер ESP32 и дополнительную плату силовых транзисторов;
- разработано собственное программное обеспечение, которое включает встроенную подсистему диагностики, доступную по WiFi;
- установлена рампа на две мины ТМ-64 с запорными замками на электроприводах;
- установлена штанга с видеокамерами и передатчиками.
Собственно от Муравья остались только модули гусениц, электромоторы пришлось заменить на более мощные, тяги под нагрузкой иногда не хватало.
Читать далее «Модернизация НРТК «Муравей», итоги.»Управление четырьмя DC двигателями.
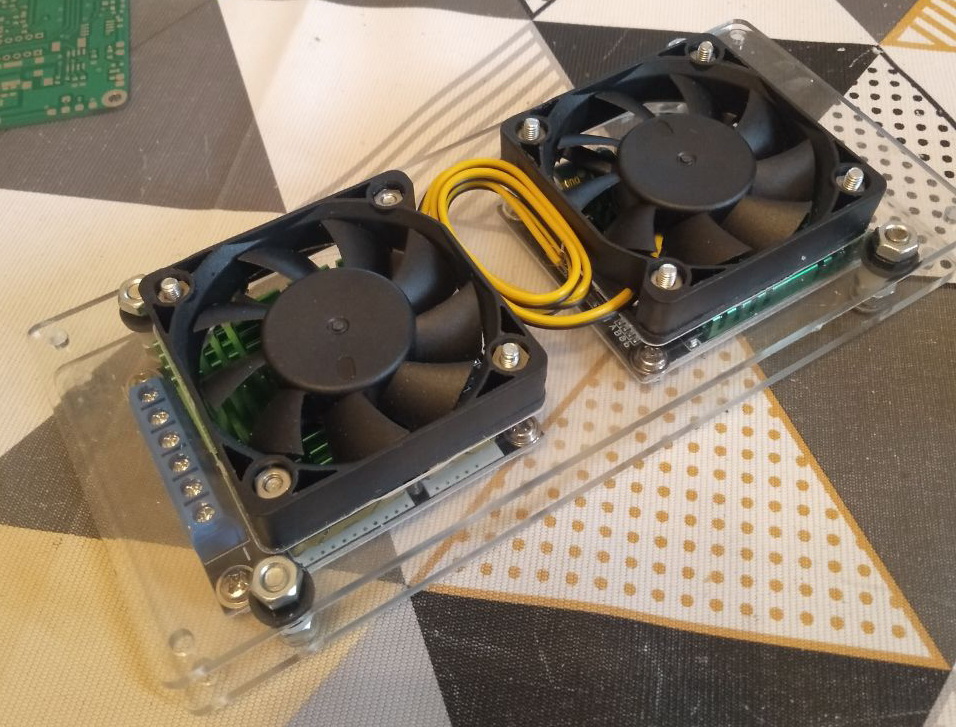
На тестирование сборка из двух драйверов для управления двигателями постоянного тока. Маркировка на платах HC-160A S2.
Ожидается до 20А номинального тока при долговременной нагрузке. Напряжение питания 9-30 В. Хотя на модуле написано 160 А, я уверен, что это предельный параметр по транзисторам. А вот толщина дорожек и контактов говорит о другом.
Наземная станция управления версии 2
Помаленьку движемся вперед. Денег куры не клюют, поэтому работа продвигается по мере появления финансов.

В настоящий момент завершена компоновка корпуса, приступаем к производству электронной начинки и софта.
Данная версия НСУ:
- может иметь встроенный комплект связи или использовать выносной;
- расширен функционал управления периферией робототехнических комплексов;
- имеет встроенный АКБ и может делиться питанием с выносными модулями связи…
и многое другое…
Ранние журавли ранней весной. ZRUSARM подготовили два варианта наземных управляемых платформ.
Определились с вариантами платформ под разные задачи. Стоимость платформ также оптимизирована. Вездеход под нагрузку до 200 кг, Воспитатель — до 300-400. Размеры отличаются немного, но отличается тяга.



Драйвер Bts7960. Опыт применения.
Драйвер коллекторного двигателя BTS7960 с напряжением питания 5-27 В и током нагрузки 10 (47) А.
Чаще встречается в виде готового модуля.
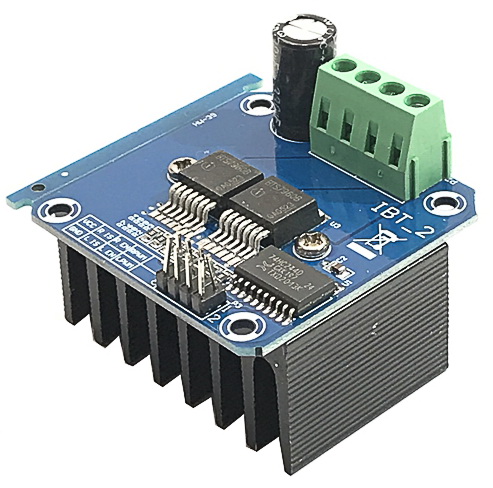
Модуль довольно интересный, можно управлять коллекторными двигателями до 24 В. Для управления потребуется один логический и два ШИМ канала управления. Я примудрил динамическое торможение, для этого потребовалось 3 канала ШИМ. На машинку требуется пара модулей или кратно им и 6 каналов управления от микроконтроллера.
Немного дегтя в бочке меда:
- крепежные отверстия расположены несимметрично относительно краев платы;
- между радиатором и платой нет диэлектрической термопрокладки, имели место замыкания силового питания на микросхему HTC244. Многие грешат на брам микросхему, я считаю это замыкание через радиатор;
- микросхема HTC244 ненужна вовсе, если вы используете управление от микроконтроллера, можно кинуть перемычки в соответствии с логикой выводов;
- ток нагрузки не 47 А, как трубят продавцы, а 10 А. Хотя в описании силовых микросхем указано 40 (60) А. Но склоняюсь в пользу 10 А, т.к. ширина дорожки +HIPOWER сомнительная, одна сгорела.
В целом как вариант быстрой сборки модуль неплох. Требуется усиление дорожки питания, установка термопрокладки и удаление HTC244 при желании.
Для тех кто заждался ранних журавлей.
Мастерская продолжает работать. Как бы это ни было тяжело в эпоху капитализма.
На подходе еще два ВОСПИТАТЕЛЯ. Как раз очень много запросов на именно габаритную машину для эвакуации раненных.

Процесс сборки идет, не без неприятностей, но инженерный ум позволяет находить решения. Например, достались драйверы без плавного тормоза, только стояночный.
Мы нашли решение, и помимо стояночного будет и динамический тормоз!

8 марта и НРТК «ВОСПИТАТЕЛЬ»
Сочинение на тему «Как я провел… испытания наземного робототехнического комплекса». Когда все отмечают праздник настоящих женщин, настоящие мужчины работают! Сегодня мы вывезли наши машины на прогулку по бездорожью.

Погрузка машин оказалась на удивление простой. НРТК Воспитатель и Сюрприз в состоянии самостоятельно подняться в транспортное средство по наспех собранным мосткам. При погрузке Воспитателя обязательно переводить штангу с головными устройствами в транспортное положение иначе можно свернуть антенны о потолок.
Читать далее «8 марта и НРТК «ВОСПИТАТЕЛЬ»»«Ранние журавли», НРТК Воспитатель и мангал.
Так уж получается, что ячеистые ограждения неплохо защищают от назойливых насекомых.
Надстройка с сетью защищает не только тяжелые, но и малые машины.